Регуляторы хода
- Введение
- Общие понятия и функции
- Защитно-сервисные функции
- Важные характеристики
- Настройка регуляторов хода
- Особенности подключения регуляторов хода
- Многомоторные модели
- Конструктивное исполнение регуляторов хода
- Производители регуляторов хода
- Принцип действия регуляторов хода
- Техническая реализация
- Принцип работы регулятора бесколлекторного электродвигателя
- Регуляторы хода бесколлекторных бессенсорных электродвигателей
- Теоретикам
- Заключение
Введение
На моделях c электроприводом требуется управлять электромоторами - их нужно включать, менять их обороты и останавливать. Если на двигателях внутреннего сгорания для этих целей служат управляемый сервомашинкой карбюратор, то электромоторам требуется отдельное устройство, которое называется регулятором хода.
Исторически первыми появились механические регуляторы. Они представляют собой мощный реостат (переменное сопротивление), который включается последовательно с электродвигателем. Специальная рулевая машинка позволяет управлять реостатом, регулируя, таким образом, обороты двигателя. Наряду с простотой, механическим регуляторам присущи такие недостатки, как поглощение драгоценной электроэнергии на борту и превращение ее в тепло. Это тепло еще нужно отвести в окружающую среду, что создает дополнительные проблемы. Особой надежностью эти регуляторы не отличаются, поскольку содержат скользящие контакты, через которые протекает большой ток. Сильный нагрев конструкции также не способствует ее надежности. Сейчас механические регуляторы используются только в простейших игрушках, где мощность силового мотора невелика, а низкая цена очень важна. На серьезные модели такие регуляторы не ставят, и мы о них больше говорить не будем.
Развитие техники полупроводниковых приборов позволило создать электронные модельные регуляторы хода без двигающихся частей, свободные от указанных выше недостатков. В них энергия поступает на мотор импульсами, и все регулировки происходят путем изменения длительности импульсов.
Помимо электронных регуляторов хода, выпускаются электронные выключатели ходовых электродвигателей. Они не регулируют мощность двигателя, а только включают и выключают его по команде с передатчика. О них мы тоже дальше говорить не будем.
В первой части данной статьи рассказано то, что вам понадобится знать о регуляторах хода. Во второй половине рассказывается о том, как они устроены и функционируют. Как и в статье про сервомашинки, эта часть для любителей не просто гонять модели, а разобраться в сути принципа действия регуляторов хода.
Общие понятия и функции
Обычно, помимо управления оборотами, регуляторы предлагают много дополнительных функций. Кроме того, они имеют ряд характеристик, от которых может зависеть выбор вами той или иной модели. Поэтому для начала дадим основные определения с комментариями, чтобы вам было легче ориентироваться.
Тормоз. Для многих моделей нужно не только быстро раскрутить двигатель на старте, но и быстро его затормозить. Это важно для автомоделей и для электролетов со складывающимся винтом. Торможение осуществляется путем замыкания обмоток двигателя через регулятор. Иногда реализуется функция "мягкого" тормоза, когда обмотки замыкаются не сразу, а небольшими импульсами. Это позволяет уменьшить нагрев регулятора и продлить жизнь коллектора электродвигателя.
Реверс. Иногда бывает полезно иметь на модели задний ход. Поэтому многие регуляторы позволяют менять направление вращения электродвигателя, подавая на него напряжение в обратной полярности. Задний ход зачастую делается не на полную мощность, так как "на всю катушку" он просто не нужен. Зато появляется возможность упростить реализацию силовых ключей заднего хода и уменьшить цену регулятора.
BEC-система (Battery Elimination Cirquit). В большинстве регуляторов для низковольтных моторов (под батареи не более 10-15 банок) встраивают систему вторичного электропитания для приемника и сервомашинок. К управлению двигателем она отношения не имеет, но позволяет не ставить на модель два аккумулятора: один силовой, а другой для системы радиоуправления. Все питание происходит от силовых аккумуляторов, что весьма удобно.
Опторазвязка. В мощных регуляторах на повышенные напряжения - от 15 до 36 банок аккумуляторов встраивают гальваническую развязку силовых цепей от цепей приемника системы радиоуправления. Это делается для того, чтобы мощные импульсные помехи из силовой части регулятора и двигателя не попали на высокочувствительные входные цепи приемника. Естественно, в случае применения опторазвязки приемнику потребуется отдельное питание.
Защитно-сервисные функции
К функциям собственно регулирования добавляют разнообразные полезные вещи:
POR (Power on Reset). Сброс при включении. При включении бортового питания модели может так случиться (по забывчивости моделиста), что ручка управления двигателем не стоит в положении "Стоп". Тогда двигатель модели может сразу выйти на максимальные обороты. Для не готового к этому моделиста такой внезапный старт может кончиться серьезными травмами и потерей модели. Для предотвращения этого в программу контроллера вводят функцию POR. Она работает так: при подаче питания на регулятор хода он принудительно ставит двигатель в положение "Стоп" вне зависимости от длительности управляющего импульса от приемника. После того, как моделист переведет ручку в положение "Стоп", блокировка снимается, и двигателем можно управлять, как обычно.
PCO (Power Cut Off). Функция отключения электродвигателя при падении напряжения аккумулятора ниже заданного порога. Очень полезна для летающих электромоделей с системой ВЕС. В отличие от наземных моделей, просто останавливающихся при отключении двигателя, летающую модель еще надо посадить на землю. Для этого после отключения ходового двигателя в аккумуляторе остается еще немного энергии для работы приемника и сервомашинок. Порог отключения рассчитан на определенный вид аккумуляторов, чаще никель-кадмиевых. Если подключить литиевые, то они могут испортиться с одной зарядки. Продвинутые регуляторы позволяют настраивать порог отключения под конкретный тип аккумулятора.
TOP (Thermal Overload Protection) - защита силовых ключей от токовой перегрузки, которая может привести к тепловому разрушению MOSFET-транзисторов. Защищает также от короткого замыкания в нагрузке. Реализуется путем встраивания в силовые цепи датчика тока и программирования в контроллере функции порогового отключения всех ключей. Сбрасывается коммутацией питания.
TP (Thermal Protection) - защита от перегрева регулятора хода. На плате ставится термодатчик, отключающий регулятор при его нагреве свыше допустимого уровня. Сбрасывается при охлаждении корпуса регулятора.
RVP (Reverse Voltage Protection) - защита от переполюсовки питающего напряжения. Неизбежно усложняет и удорожает регулятор, ухудшая его параметры. Применяется редко. На большинстве хороших регуляторов хода не используется.
Обилие систем защиты в регуляторах может создать ложное представление о том, что регулятор хода нельзя спалить. Это не так. Во-первых, регуляторы редко защищают от переполюсовки силового аккумулятора. В этом случае выгорают, как правило, все силовые ключи. По моим наблюдениям, так сжигается каждый второй регулятор хода. Во-вторых, в некоторых случаях защиту приходится отключать. Например, в электровертолете. Потому что срабатывание защиты в полете сохранит регулятор, но угробит саму модель. В-третьих, защита спасает регулятор, только если он работает с электродвигателем, более-менее согласованным с ним по характеристикам.
Важные характеристики
У регулятора хода есть несколько важных характеристик, от которых зависят его возможности, определяющие, с каким двигателем и аккумулятором он сможет работать вообще.
Максимальный постоянный ток. Определяет, какой максимальный ток двигателя может выдерживать регулятор длительное время.
Параметр простой лишь на первый взгляд. На английском обозначается как Continuous Current. Путаница возникает в разном понимании термина Continuous. Для микроэлектроники это доли секунды. Т.е. это ток, который выдерживают силовые ключи и не срабатывает защита TOP (см. выше). Совсем не означает, что такой ток выдержат провода и печатные проводники в регуляторе. Поэтому, если в характеристиках регулятора написано Continuous Current - 400А, это совсем не значит, что регулятор выдержит такой ток в течение минуты. Реальный продолжительный ток в несколько раз меньше. Многие производители указывают время продолжительности максимального тока.
Максимальный пиковый ток. Это ток, который кратковременно может выдерживать регулятор. Обычно пиковый ток в несколько раз превышает постоянный. Пиковые токи возникают во время старта, когда двигатель должен быстро развить большой вращающий момент. Например, при резком старте автомодели.
В настоящее время, чтобы облегчить жизнь потребителей, зачастую применяется альтернативная система обозначения возможностей регуляторов. Подобное можно часто встретить для автомоделей. Там для регуляторов сообщается, на скольки-витковые моторы они рассчитаны. Естественно, для моторов, в свою очередь, указывается количество витков в обмотках. Т.н. безлимитные регуляторы могут работать с любыми автомодельными электродвигателями, но не с любыми двигателями вообще!
Максимальное напряжение батареи. При большем, чем разрешено, напряжении батареи регулятор может сгореть. Часто в характеристиках обозначают не напряжение, а число банок в батарее NiCd аккумуляторов. Умножьте эту величину на 1,2 Вольт и получите максимальное разрешенное напряжение.
Внутреннее сопротивление. Само собой, что схемы коммутации электроэнергии, применяемые в регуляторах, вносят определенные потери энергии, за счет внутреннего сопротивления ключей. Поэтому все регуляторы имеют такую характеристику, как внутреннее сопротивление. Хоть внутреннее сопротивление регулятора и невелико (0,0006 Ом у чемпионатных регуляторов), вносимые потери могут сыграть большую роль, когда дело дойдет до серьезных соревнований.
Кстати, у реверсивных регуляторов внутреннее сопротивление обычно больше, чем у аналогичных моделей без реверса. Это происходит из-за особенностей построения схем коммутации электродвигателя. Какой из этого можно сделать практический вывод? Да очень простой. Если вы собираетесь серьезно кататься на автомодели, и потом выступать в соревнованиях, вам лучше сразу учиться на регуляторе без реверса. Хотя поначалу без заднего хода ездить неудобно.
Частота импульсов регулятора. Оптимальная частота регулирования зависит от параметров используемого электродвигателя. Если частота много выше оптимальной, - растут потери на коммутацию ключей в регуляторе. Эти потери связаны с тем, что даже самый быстрый ключ не открывается и не закрывается мгновенно. В то время, когда он переходит из одного состояния в другое, на нем теряется энергия. Если же частота много ниже оптимальной, - растут индуктивные потери в моторе.
В регуляторах хода бесколлекторных двигателей еще больше вариантов параметров. Поэтому при подборе регулятора к двигателю лучше просто ориентироваться на рекомендации производителя.
Настройка регуляторов хода
Производители регуляторов хода стараются сделать свои изделия совместимыми с широкой номенклатурой двигателей и передатчиков радиоуправления. Поэтому они вводят в них много параметров, настраиваемых пользователем.
В первую очередь, настраиваются положения джойстиков передатчика, соответствующие режимам "нейтраль", "тормоз", "максимальный газ", "реверс". Такие режимы, как "тормоз" и "реверс", могут отключаться. Настройка крайних значений обеспечивает уверенную работу регулятора с передатчиками, у которых могут существенно отличаться значения продолжительности канального импульса в крайних положениях джойстика. В некоторых регуляторах настраивается величина мертвой зоны в положении "нейтраль". Последовательность операций по настройке различная у разных производителей. Здесь надо следовать указаниям инструкции. В качестве команд настройки используются кнопки на корпусе регулятора, либо те или иные положения джойстика. Некоторые регуляторы переходят в режим настройки при подключении или съеме перемычки-джампера, как в компьютере. В качестве индикатора настраиваемых режимов служат светодиоды на корпусе регулятора. В последнее время многие регуляторы используют звуковую индикацию режимов настройки. При этом в качестве пищалки работают обмотки подключенного двигателя.
Некоторые регуляторы позволяют изменять частоту импульсного регулирования при работе регулятора с разными двигателями. Причем частота может определяться отдельно для прямого хода и для торможения. В некоторых приложениях могут отключаться при программировании системы защиты, например, в электровертолете.
В продвинутых регуляторах хода бессенсорных двигателей есть возможность изменения сдвига фаз (Timing) трехфазного тока относительно положения ротора. Это связано с особенностью работы бессенсорных регуляторов, у которых режимы наибольшей мощности и наивысшего КПД не совпадают. В этом случае пользователь может выбрать то, что для его модели важнее.
Поскольку мир моделизма разнообразен, выпускаются специализированные регуляторы, скажем, для автомоделей, судомоделей, самолетов и вертолетов. В этих моделях набор реализуемых функций разнообразен. Чтобы не расширять необоснованно номенклатуру регуляторов хода, некоторые производители делают универсальный прибор с перенастройкой под судо- авто- авиамодели.
В большинстве приложений регулятор хода регулирует мощность, подводимую к двигателю, пропорционально положению джойстика на передатчике. Но не везде. В электровертолетах гораздо важнее регулировать не мощность, а обороты двигателя. В этом случае при изменении нагрузки и постепенной разрядке аккумулятора все настройки системы управления сохраняют свою эффективность. В регуляторы хода коллекторных двигателей для обратной связи добавляют датчик Холла и магнитик на роторе вертолета. Регуляторы хода бесколлекторных двигателей имеют информацию об оборотах уже внутри и дополнительных датчиков не требуют. Многофункциональные регуляторы при настройке переводятся в вертолетный режим, после чего они стабилизируют и регулируют не мощность, а обороты двигателя.
В продвинутых регуляторах может настраиваться очень много параметров. Для примера рассмотрим параметры настройки автомодельных регуляторов хода "Циклон" фирмы Novak на следующем графике:
По оси абсцисс - длина канального импульса при соответствующем положении курка газа. Здесь обозначены следующие точки и соответствующие им параметры:
- Абсцисса точки а - положение курка при 100% торможении
- Длина участка b-c - величина мертвой зоны нейтрали
- Середина участка b-c - положение курка в нейтрали
- Ордината точки d - минимальная величина газа
- Абсцисса точки e - положение курка на 100% газа
Кроме того, для участка а-b задается частота импульсов торможения, для участка d-e частота импульсов прямого хода, для нейтрали задается величина подтормаживания (Drag Brake) и частота его импульсов. Итого - девять параметров. Это совсем не предел. У шульцевского авторегулятора mcc1010 устанавливается пятнадцать параметров. Понятно, что не всякий моделист готов самостоятельно кропотливо оптимизировать все эти параметры под свой мотор и конкретную трассу. Чтобы упростить эту задачу, производители создали несколько комплектов параметров под определенные трассы и моторы. Эти комплекты хранятся в памяти регулятора хода. Моделисту средней руки остается парой нажатий кнопок выбрать подходящий набор параметров. Крутые чемпионы, конечно, настраивают свои болиды, в т.ч. и в части регулятора хода, сами.
Особенности подключения регуляторов хода
Провода. Регулятор хода соединяется проводами с аккумулятором и электродвигателем. Эти провода - важный элемент в силовой установке. Для правильной ее работы необходимо соблюдать некоторые рекомендации. В качестве соединительных проводов используется медный гибкий многожильный провод. Провода не электротехнические, а специальные - с очень большим количеством очень тонких жил. Такие провода, помимо электромоделей, широко используются для подключения акустических систем большой мощности звуковой аппаратуры класса Hi-End, и их можно найти в серьезных магазинах аудиотехники. Наиболее распространены провода сечением 1 кв. мм. для токов до 20 ампер, 1,5 кв. мм. - для токов до 30 ампер, 2,5 кв. мм. - до 50 ампер и 4 кв. мм. - до 80 ампер. Использование меньшего сечения на большие токи чревато как минимум снижением КПД мотоустановки, как максимум - аварией с пожаром. Наоборот - допустимо, но необоснованно завышается вес, - медь-то тяжелая!
Здесь даны значения допустимых токов, рекомендуемые для специальных модельных проводов в термостойкой силиконовой изоляции. При нагружении максимальным током они прилично греются. Для проводов в обычной изоляции лучше уменьшить допустимый ток от выше рекомендованных значений раза в полтора.
Длина проводов от регулятора до двигателя делается как можно меньше. Дело в том, что по этим проводам коммутируются большие токи сравнительно высокой частоты. Компоненты их спектра могут попасть в радиоканал аппаратуры управления в виде помех, спровоцировав отказ системы управления.
Конденсаторы. Для уменьшения широкополосных помех, генерируемых щеточно-коллекторым узлом, используется его шунтирование керамическими или тонкопленочными конденсаторами. Один конденсатор включается между щетками, два других - между каждой щеткой и корпусом двигателя. Емкость конденсатора подбирается компромиссным путем. Дело в том, что конденсаторы большей емкости лучше подавят помехи. Но при увеличении их емкости растут коммутационные потери на ключах регулятора хода. Поэтому из благих пожеланий уменьшить помехи не надо увеличивать емкость блокирующих конденсаторов! Так можно резко снизить КПД, а то и спалить регулятор хода. А вот длину проводов надо минимизировать, потому как, в сущности, это антенны, излучающие помехи. Кстати, при проверке дальности работы аппаратуры радиоуправления, силовой мотор должен работать на 50% газа. Уровень помех при этом максимальный. Провода от аккумулятора до регулятора хода тоже не должны быть слишком длинными, но по другой причине. Если длинные провода от регулятора до электродвигателя создают радиопомехи, то слишком длинные провода от аккумулятора до регулятора создают угрозу для целостности самого регулятора хода.
Вход регулятора всегда шунтируют электролитические конденсаторы большой емкости, демпфирующие броски тока. Тем не менее, производители ограничивают максимально допустимую длину и этих проводов. Если же провода по конструкции модели должны быть длиннее, то в промежутке между регулятором и аккумулятором впаиваются дополнительные электролитические конденсаторы, шунтирующие провода питания. В некоторых случаях для снижения потерь энергии на аккумуляторе полезно добавить такие конденсаторы и с короткими проводами. Радикально это не улучшит работу силовой установки, но несколько процентов энергии за одну гонку прибавит. Поклонники отечественной элементной базы должны учитывать, что зарубежные электролитические конденсаторы обладают намного меньшей инерционностью, чем наши. Если уж хочется сэкономить, то припаяйте параллельно нашему электролиту пленочный конденсатор. Хотя такая замена неравноценна установке специальных импульсных конденсаторов. Бывает, что от механических вибраций шунтирующие вход конденсаторы отламывают свои выводы "под корешок". При замене их на отечественные надо учитывать приведенные выше соображения.
Разъемы. Между регулятором и двигателем провода, как правило, припаиваются, за исключением случаев, когда в конструкции двигателя или регулятора уже заложены разъемы. Между регулятором хода и аккумулятором приходится ставить разъем, потому что аккумулятор на электричке меняется как топливо - от старта к старту на свежезаряженный. Здесь надо применять только специальные модельные разъемы, как правило, в позолоченном исполнении. Обычные электро- или радиотехнические разъемы не рассчитаны на такие огромные токи, какие стали нормой в моделизме. Стык двухполюсный, и обязательно должен иметь механическую защиту от переполюсовки. Помните, регуляторы хода чаще всего не имеют защиты от переполюсовки. Как уже говорилось, практика показывает, что половина сгоревших регуляторов выходят из строя по этой причине. При использовании специальных отдельных разъемов типа гнездо - штекер, защиту делают так: плюс от аккумулятора распаивают на штекер, а минус - на гнездо. У регулятора хода наоборот. В этом случае защита будет обеспечена.
Выключатель. В силовых проводах обычно не делают выключателей. Все регуляторы хода рассчитаны на длительное подключение силовой части при обесточенной сигнальной. Во многих регуляторах с ВЕС имеется отдельный выключатель, который подает питание на приемник и сервомашинки. В выключенном режиме ключи регулятора хода не разряжают (практически) силовой аккумулятор. Хотя, хранить аккумулятор в подключенном состоянии не надо!
Теплоотвод. Несмотря на высокий КПД современных регуляторов хода, на них все же выделяется заметное количество тепла, которое нужно отвести. Для облегчения этой задачи некоторые регуляторы имеет небольшие пластинчатые радиаторы. Размещение регулятора хода на модели должно обеспечивать обдув его корпуса набегающим потоком воздуха. Это правило часто вступает в противоречие с необходимостью защиты регулятора от влаги и грязи на авто- и судомоделях, где их заворачивают в герметичную оболочку. Для разрешения этой проблемы лучше всего брать регуляторы, рассчитанные на меньшее количество витков, а лучше - безлимитные. Их КПД гораздо выше и они рассеивают меньше тепла. Можно, конечно, не обращать внимания на все вышесказанное, и лепить соединения, как вздумается. Но тогда и результат может быть таким:

Многомоторные модели
На моделях с электроприводом гораздо чаще, чем у моделей с ДВС, используются многомоторные силовые установки. Это связано с тем, что электродвигатель, как объект управления, гораздо ближе к идеалу силового привода, чем ДВС. В многомоторных моделях, где необходимо раздельно управлять мощностью двигателей, на каждый из них ставится свой регулятор хода. Но так бывает не у всех моделей. Во многих случаях многомоторность есть дань копийности, либо стремление получить очень большую мощность, которая не может быть обеспечена имеющимися электродвигателями в одиночном варианте. В этом случае для коллекторных моторов совсем не обязательно использовать по отдельному регулятору хода. Вполне допустимо к одному регулятору подключать и несколько электродвигателей. При этом максимально допустимый продолжительный ток регулятора должен превышать суммарный потребляемый ток всех подключенных к нему электродвигателей.
Двигатели подключаются к регулятору хода параллельно друг другу. В таком соединении на частичных режимах их характеристики выравниваются. Как это понимать?
Представьте автомодель, на которой каждое колесо ведущего моста приводится от своего электродвигателя, которые соединены параллельно и подключены к одному регулятору хода. На частичных режимах (неполного газа) выходные мощности и моменты обоих двигателей зависят друг от друга. К примеру, если момент одного из колес уменьшится, - колесо забуксовало, то крутящий момент его электродвигателя также уменьшится, а у другого двигателя - увеличится. Получается автобалансировка по мощности и моменту, аналогичная по сути работе дифференциала повышенного трения - Торсен. Как правило, такое свойство параллельного соединения очень полезно для моделей. На максимальном газу, к сожалению, автобалансировка почти не работает.
При последовательном присоединении моторов к одному регулятору хода их крутящие моменты примерно равны и слабо зависят от степени нагруженности. При буксовании одного из колес на неполном газу, момент другого, более нагруженного, двигателя даже несколько уменьшится. Такая зависимость крайне невыгодна для управляемости модели. Поэтому последовательное соединение на практике почти не используется.
А что же с бесколлекторными двигателями? Для бесколлекторников с датчиками, безусловно, необходимо ставить на каждый двигатель по своему регулятору хода. Для бессенсорных возможно (при определенных условиях) к одному регулятору подключать два двигателя. Главное условие - это благоприятный запуск двигателей, который обеспечивается малым необходимым моментом при пуске двигателей. Многие производители регуляторов хода считают такой режим нештатным, и не дают гарантии на качественную работу их изделий с двумя бесколлекторниками одновременно. Тем не менее, практика показывает вполне успешное использование одного регулятора с двумя двигателями на модели самолета. Теоретически возможный сбой при пуске на практике автором ни разу не наблюдался.
Недопустимо использовать с одним регулятором хода два бесколлекторных двигателя, если их валы жестко связаны друг с другом. К примеру, при работе через шестеренчатый редуктор на общий гребной вал.
Конструктивное исполнение регуляторов хода
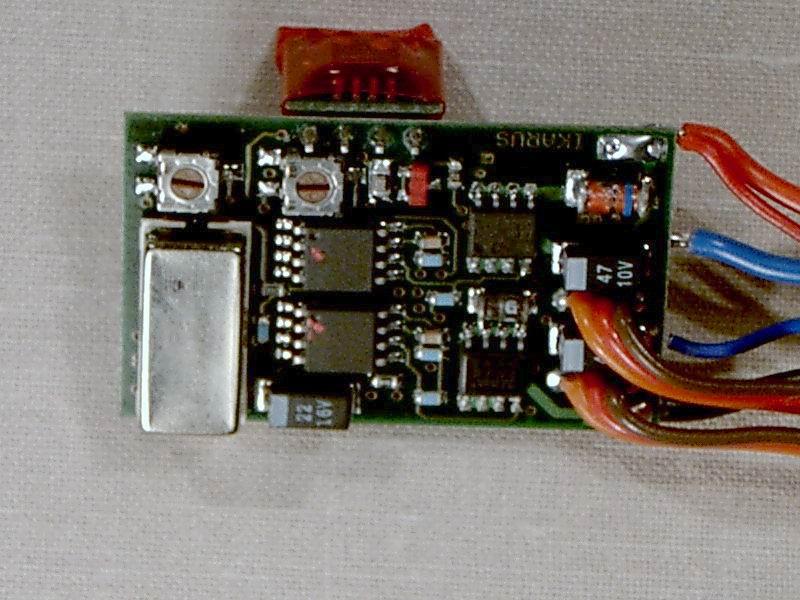
Все многообразие конструкции регуляторов хода сейчас выродилось в два типа - регуляторы хода для низковольтных авто- и судомоделей делаются на одной печатной плате, помещенной в полистироловую коробочку с радиатором, или без:

|

|
Остальные типы регуляторов исполнены на одной или нескольких печатных платах, собранных в виде бутерброда в пакет и затянутых в термоусаживаемую трубку:

В регуляторах бесколлекторных двигателей на одной плате собрана схема управления, а на остальных - силовые ключи.
|

|
С одной и той же платой управления может быть собрано разное количество плат с ключами. Соответственно, разным будет и допустимый ток.
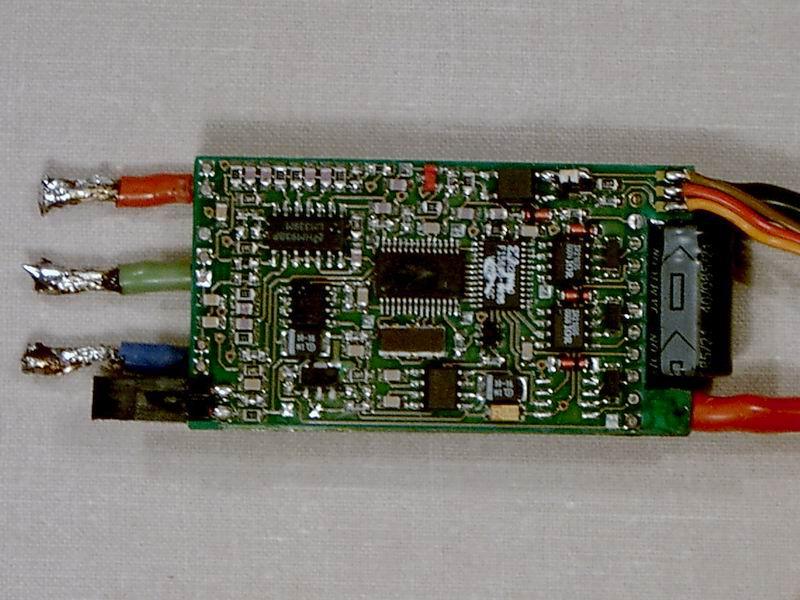
Регуляторы хода могут быть конструктивно объединены на одной плате с другой бортовой электроникой, как это сделано в пикоборте электровертолета:
Производители регуляторов хода
Регуляторы хода выпускает огромное количество моделистских фирм. Есть среди них изделия элитного плана - для спортсменов, а есть и ширпотреб. Соответственно изменяется и цена. Одним из ведущих брендов является фирма "Шульце-электроник". Хорошие регуляторы делает "Контроник", "LRP", "Jeti", "Castle Creations" и куча других. Краткий список сайтов фирм-производителей, специализирующихся на регуляторах хода:
- http://www.lrp-electronic.de
- http://www.teamnovak.com
- http://www.schulze-elektronik-gmbh.de
- http://www.kontronik.com
- http://www.jetimodel.cz
- http://www.castlecreations.com
Помимо них, регуляторы хода выпускают почти все крупные производители аппаратуры радиоуправления, а также многие производители автомоделей (Associated, DuraTrax, Traxxas). Многие модельные фирмы, такие как Graupner, Robbe, Great Planes, Global тоже выпускают регуляторы под собственной маркой. Даже наш отечественный "Термик" и то выпускал (сейчас - не знаю) недорогие регуляторы хода.
Рассуждая о качестве изготовления, нужно учитывать, что производитель зачастую сам только разрабатывает изделие (а иногда и это заказывает третьей фирме). Изготовление печатных плат и сборка чаще всего ведутся на Тайване. При этом на самом изделии об этом никаких следов не остается. Слоганы типа "Германское качество" или "Сделано в EU" - чистая реклама.
Принцип действия регуляторов хода
Регулятор хода включается между аккумулятором и силовым электродвигателем. Управление регулятором осуществляет канальный импульс с приемника аппаратуры радиоуправления. Напомним его параметры: период - 20 мс, длительность изменяется от 1 до 2 мс. В простейшем случае в задачу регулятора входит регулирование потока мощности от аккумулятора к двигателю. При длительности канального импульса 1 мс - двигатель выключен, при 2 мс - двигатель развивает максимальную мощность. В промежутке мощность плавно изменяется. Как это происходит?
Прежде чем перейти к структурной схеме регулятора хода, отметим, что сейчас выпускаются исключительно импульсные регуляторы с широтно-импульсным регулированием. Другие варианты регулирования морально устарели и в наше время в моделизме не используются. Поэтому мы о них говорить не будем. Силовые электродвигатели бывают с коллектором и без. Соответственно, регуляторы хода можно разделить на два типа - для коллекторных двигателей и для бесколлекторных двигателей. Некоторые из регуляторов второго типа могут работать и с коллекторными моторами. Но не наоборот! Руководствуясь принципом от простого к сложному, мы расскажем вначале о работе простейшего регулятора коллекторного электродвигателя. Вот типовая структурная схема его включения:
- Г - управляющий генератор;
- К - силовой ключ;
- D - диод;
- М - электродвигатель;
- А - аккумулятор.
Канальный импульс поступает на управляемый генератор импульсов Г. Частота импульсов постоянна, а вот их длительность зависит от длительности входного канального импульса таким образом:
При длительности выходного импульса 0% - на выходе генератора их просто нет - там низкий уровень управляющего ключом сигнала. Ключ К - закрыт, ток через двигатель М не течет.
При длительности выходного импульса 100% от периода на выходе генератора тоже импульсов нет, но уровень управляющего ключом сигнала высокий. Ключ К - открыт и все напряжение от аккумулятора А приложено к двигателю М. Он развивает при этом максимальную мощность.
При промежуточном значении длительности канального импульса на выходе генератора присутствуют импульсы длительностью, определяемой по выше приведенному графику. Скажем, при канальном импульсе 1,5 мс на выходе генератора присутствуют импульсы, длительность которых составляет половину периода. Соответственно, ключ К половину периода открыт, половину - закрыт. Напряжение в т. 1 повторяет эту форму. Дотошный читатель может сказать, что на двигатель энергия подается импульсами, а значит, он должен дергаться и, дергаясь, крутиться в одну сторону. Чтобы понять, почему этого не происходит, придется немного вспомнить устройство и работу коллекторного двигателя постоянного тока. В школе все мы учили, что такой двигатель состоит из магнитного статора и ротора - в простейшем случае проволочной рамки, по которой течет ток. Магнитное поле статора взаимодействует с магнитным полем рамки так, что на нее начинает действовать сила Лоренца, пропорциональная согласно одноименного закона току в рамке. То есть момент ротора пропорционален току, а не напряжению. Обратим внимание, что рамка на магнитном сердечнике ротора обладает заметной индуктивностью L и сопротивлением R. Вспомним также, что коллекторная машина постоянного тока обратима. Если подать на нее напряжение - она работает как двигатель. Если же, наоборот, к ней подключить нагрузку и начать вращать ее ротор, то машина станет генератором, а в нагрузку потечет ток. Так вот, даже когда машина работает как двигатель, в обмотках ее ротора появляется напряжение Е, пропорциональное оборотам ротора. Для чего мы так долго и нудно рассуждали? Для того, чтобы нарисовать эквивалентную схему электродвигателя постоянного тока:
Для тех, кто не знает, что такое эквивалентная схема: вы не найдете в электродвигателе ни отдельной катушки, ни резистора, ни источника напряжения. Каждый миллиметр обмотки содержит и то, и другое, и третье. Собрав отдельно индуктивности, сопротивления и наведенное напряжение, мы получим эквивалентную схему, которая будет работать в цепи точно так, как настоящая обмотка ротора. Теперь посмотрим, как потечет ток через двигатель, когда ключ открыт:
Заметьте, что ток течет против направления напряжения, наведенного в обмотках - это и есть полезная работа тока по вращению ротора. На сопротивлении часть энергии тока превращается в тепло - эта часть вредная, снижающая КПД двигателя. На индуктивности часть энергии запасается в магнитном поле катушки. Источником энергии для всех трех компонент здесь является аккумулятор.
Когда ключ закрывается, ток не прекращает свое движение и схема выглядит так:
Как видите, ток через двигатель продолжает течь в прежнем направлении. Источником энергии для него служит магнитное поле индуктивности, а диод - замыкает цепь в паузе, когда ключ К закрыт.
Поскольку вращающий момент ротора создает ток, а не напряжение на роторе, вам понятно, почему при импульсном питании двигателя двигатель не дрожит. Чтобы индуктивность могла запасать энергию и отдавать ее, ток через нее должен соответственно возрастать и убывать. Для уменьшения пульсаций тока индуктивность должна быть больше (больше суммарная запасенная энергия), а период импульсов меньше - меньше порции энергии, перекачиваемой туда - сюда. Так мы пришли к важнейшему принципу определения необходимой частоты работы регулятора хода. Она должна быть тем больше, чем меньше индуктивность обмоток ротора и больше мощность мотора.
А что будет, если частота генератора ниже оптимальной?
Энергии, запасенной в индуктивности обмоток двигателя в течение импульса, не будет хватать для сглаживания пульсаций тока в паузе между импульсами. Появится заметное дрожание ротора. Но это не страшно. Плохо другое: - уменьшится мощность двигателя, поскольку полезную работу совершает только постоянная компонента импульсного тока. Переменная же будет рассеиваться на магнитопроводе двигателя, нагревая его. Упадет КПД в связке регулятор хода - электродвигатель. Причем виновным окажется неправильно подобранный регулятор хода, а греться будет двигатель.
Техническая реализация
Итак, мы рассмотрели принцип действия простейшего регулятора хода коллекторного модельного двигателя. Из чего и как делаются компоненты рассмотренной блок схемы? Исторический аспект здесь мы упоминать не будем. Управляемый генератор Г во всех без исключения современных регуляторах хода делается на программируемом микроконтроллере. Характеристика зависимости длительности импульсов управления ключом от длительности входного канального импульса формируется программным путем. В качестве коммутирующего силового ключа в регуляторах хода используются исключительно полевые транзисторы с изолированным затвором и каналом вертикальной структуры. За рубежом, да и у нас, их называют MOSFET-транзисторами. Они характеризуются низким сопротивлением в открытом состоянии и высоким быстродействием. В маломощных регуляторах хода может стоять один транзистор. Однако, как правило, для снижения сопротивления в открытом состоянии и увеличения максимального коммутируемого тока в параллель ставится много таких транзисторов - до 16 штук. Чаще всего используются n-канальные транзисторы, поскольку они при равной с p-канальными стоимости имеют меньшее сопротивление в открытом состоянии и больший максимально допустимый ток. В обычных регуляторах используются транзисторы в корпусах ТО-220. В особо миниатюрных, а также регуляторах мощных бесколлекторных двигателей - в корпусе SO-8.
Тормоз. Электродвигатель на больших оборотах обладает приличной кинетической энергией. Как и куда она девается при торможении?
В регуляторах хода, реализующих функцию торможения, помимо ключа, дозирующего подачу энергии на двигатель от аккумулятора, ставится еще один ключ, параллельно двигателю:
Алгоритм функционирования тормозов такой: Когда управляющий канальный импульс находится в положении "Стоп" ключ К закрыт, а ключ К2 открыт. Мы помним, что при вращении ротора коллекторной машины постоянного тока она работает как генератор. Поэтому, если попытаться покрутить ротор двигателя, то вырабатываемая им энергия потечет через ключ К2. Ротор проворачиваться будет, но с заметным усилием, тем большим, чем больше скорость раскрутки ротора. При переводе джойстика передатчика в положение "Ход" начинает работу генератор импульсов регулируемой длительности, открывающий ключ К. Ключ К2 при этом закрывается. Двигатель начинает раскручиваться. Если после этого джойстик передатчика перевести снова в положение "Стоп", то ключ К закрывается, а ключ К2 открывается. Вырабатываемая энергия течет через открытый ключ К2 и превращается в тепло как на сопротивлении ключа, так и на сопротивлении обмоток самого двигателя. Кинетическая энергия ротора быстро перекачивается в тепловую. Поскольку сопротивление ключей маленькое, токи торможения получаются очень большими. На мощных регуляторах, чтобы не допустить перегрузки ключей и двигателя торможение делают не сразу резким, а плавным. Для этого в начале торможения ключ К2 управляется также от генератора импульсов переменной длительности. В низковольтных регуляторах хода в качестве тормозящих ключей чаще используют p-канальные MOSFET-транзисторы, потому что ими проще управлять. При использовании n-канального транзистора для управления делают схему смещения потенциала или ставят специальную микросхему - драйвер ключа. Наряду с возможностью торможения, дополнительный ключ, параллельный двигателю, избавляет от необходимости установки отдельного диода, имевшегося на схемах в начале статьи. Дело в том, что современные силовые MOSFET-транзисторы имеют внутри встроенный интегральный диод, который с успехом справляется. Тормозной ключ также выполняют из нескольких транзисторов, соединенных в параллель. Как правило, их меньше, чем в ключе К. Для гоночных автомоделей некоторые производители встраивают в регулятор хода имитацию ABS-тормозов больших автомобилей. Заключается она в прерывистом торможении. Имитацией потому, что никакого слежения за вращением колес здесь нет. Ее эффективность эквивалентна случаю, когда мы, едучи в настоящем автомобиле по скользкой дороге, прерывисто тормозим. Иногда это выручает. Но это не настоящая ABS.
Реверс. Реверсивные регуляторы хода (нереверсивные регуляторы называют еще прямоходными ) устроены так:
Как видно из схемы, электродвигатель включен в диагональ моста из ключей. При открытии ключей К1 и К3 двигатель вращается в прямом направлении:
а при открытии К2 и К4 - в обратном:
Как правило, в верхних плечах моста используются p-канальные транзисторы, а в нижних n-канальные. К1 либо К2 открыт в течение всего времени вращения двигателя в одном направлении. К3 либо К4 открывается импульсным сигналом регулируемой длительности, который плавно изменяет подаваемую на двигатель мощность. Из соображений экономии, как правило, реверсивные регуляторы делают несимметричными. В плечах моста для прямого хода К1 и К3 ставят в параллель гораздо больше транзисторов, чем в плечах К2 и К4 обратного хода. Чтобы регулятор при этом не сгорел от перегрузки при длительном реверсе, в некоторых регуляторах вводят автоматическое ограничение времени реверса. У одной из линеек реверсивных регуляторов LRP оно составляет около 5 секунд. Этого хватает, чтобы модель автомобиля отъехала назад от препятствия. А ключи перегреться не успеют.
Из схемы включения уже видно, что при равном количестве ключей в каждом плече, прямоходный регулятор обладает вдвое меньшим внутренним сопротивлением, чем реверсивный, хотя заметно дешевле его, так как использует почти вчетверо меньше дорогих MOSFET-транзисторов. К примеру, популярный регулятор серии Квантум от LRP в прямоходном исполнении имеет сопротивление 6 мОм, а в реверсивном 30 (ключей в плече у него меньше). Таким образом, не стоит применять реверсивные регуляторы там, где они не очень нужны. Это - деньги на ветер.
Динамическое торможение в реверсивном регуляторе делается открытием ключей обоих нижних плеч моста при закрытых верхних:
ВЕС. ВЕС представляет из себя чаще всего простейший параметрический стабилизатор на 5 вольт на дискретных элементах, либо в интегральном исполнении (т.н. линейный стабилизатор). Здесь может быть проблема с перегрузкой мощными сервомашинками этого стабилизатора с просадкой напряжения и последующим отказом системы радиоуправления. Подробнее об этом написано в статье про сервомашинки.
Опторазвязка. В мощных регуляторах на повышенные напряжения - от 15 до 36 банок аккумуляторов встраивают гальваническую развязку силовых цепей от цепей приемника системы радиоуправления. Это делается для того, чтобы мощные импульсные помехи из силовой части регулятора и двигателя не попали на входные высокочувствительные цепи приемника. В этом случае типовая входная цепь регулятора выглядит так:
Для развязки используется, как правило, обычный диодно-транзисторный оптрон. В этом случае о ВЕС-системе говорить не приходится, а на модели стоит отдельный бортовой аккумулятор.
Принцип работы регулятора бесколлекторного электродвигателя
Во введении мы упоминали, что на моделях применяются только электродвигатели постоянного тока с возбуждением только от постоянных магнитов и с коллектором или без. Прежде чем перейти к бесколлекторным регуляторам, посмотрим, что делает коллектор в двигателе и чем он плох. В сущности, задача коллекторно-щеточного узла проста: при определенном положении ротора подавать напряжение с аккумулятора на определенные секции его обмоток. Плох же коллектор тем, что он изнашивается, причем тем быстрее, чем больше мощность мотора. Разрушению его элементов помимо простого механического износа способствуют много факторов, к которым можно отнести повышенную температуру, электроэрозионные процессы, загрязнение продуктами износа щеток и т.п. Кроме того, на этот узел приходится значительная часть потерь энергии, снижающей суммарный КПД электродвигателя. Чтобы решить все проблемы разом, придумали передать функции переключения обмоток в зависимости от положения ротора регулятору хода. В электродвигателе обмотки и постоянные магниты поменяли местами. Т.е. на ротор переместились постоянные магниты, а обмотки размещены в пазах неподвижного статора. Все секции обмоток соединены в три группы (три фазы), которые могут присоединяться к регулятору хода звездой или треугольником:
Достоинства обоих видов соединения мы здесь рассматривать не будем, это предмет моторостроения. Помимо этого, в двигатель встраиваются три датчика положения ротора. Они бывают на основе оптопары с открытым оптическим каналом, но чаще - на основе датчиков Холла. Схема включения при этом выглядит так:

Как видите обмотки двигателя, соединенные звездой подключены к трехфазному мосту из ключей К1-К6. Управляет ключами моста специальный контроллер К. Информацию о положении ротора он получает от датчиков Д1-Д3. Контроллер трудно выполнить на основе программируемого микроконтроллера, поскольку для коммутации нужно высокое быстродействие. Поэтому в серийных регуляторах хода бесколлекторных двигателей ставят специализированную микросхему - ASIC (например, в регуляторах фирмы Schulze), либо программируемую логическую интегральную схему - ПЛИС- FPGA (например, в регуляторах фирмы Kontronik). Можно собрать ее и на дискретных элементах, но это сложно и громоздко. В последнее время появились довольно скоростные микроконтроллеры с тактовой частотой в десятки мегагерц. На их основе можно сделать программным путем контроллер для не слишком скоростных электродвигателей. Весьма перспективно формировать контроллер на базе программируемых сигнальных процессоров - DSP. Пример такого решения можно посмотреть здесь: http://www.2mslbldc.g4g-server.com/bauunterlagen.html. Как видно из описания, применение DSP резко упрощает изготовление регулятора хода, низводя его до сложности элементарного регулятора коллекторного двигателя, что очень привлекательно для самостоятельной его сборки.
В контроллере зашито несколько вариантов коммутации, включающих прямой ход, реверс, торможение, отключение обмоток. Что именно должен делать контроллер, ему подсказывает устройство управления У, которое анализирует длительность канального импульса. Здесь же формируются импульсы переменной длительности для регулирования мощности двигателя. Управляют они через контроллер К ключами только нижних плеч трехфазного моста, аналогично реверсивным регуляторам коллекторных двигателей. Устройство У реализуется на обычном микроконтроллере. Силовые ключи, как и в обычных регуляторах хода, формируются из нескольких MOSFET-транзисторов. В одном из регуляторов Kontronik-а в каждом плече стоит по 16 транзисторов. Всего в регуляторе получается 16*6=96 транзисторов! Вот почему они такие дорогие. Чтобы регулятор получился компактным и легким, транзисторы берутся в миниатюрном корпусе SO-8. Для управления таким множеством ключей используют специальные микросхемы-драйверы ключей. Как правило, в регуляторах бесколлекторных двигателей присутствуют все описанные выше сервисно-защитные функции.
Регуляторы хода бесколлекторных бессенсорных электродвигателей
Когда ротор двигателя вращается, в его обмотках наводится напряжение, которое можно использовать для определения положения ротора. Эта идея реализована в регуляторах хода бесколлекторных электродвигателей, которым не нужны датчики положения ротора. Вместо них используются обмотки статора. Типовая схема определения момента коммутации обмотки для одной фазы выглядит так:
В схеме используется компаратор и делители напряжения на резисторах. В качестве компаратора большинство фирм использует микросхему L339. Поскольку на напряжение наводки накладывается поданное с аккумулятора на обмотки тяговое напряжение, результат компарирования необходимо стробировать в контроллере, - принимать только тот переход через 0, который не совпадает по времени с коммутированием обмоток. Впрочем, если это уже не понятно, то не стоит ломать голову. Важно одно: пока ротор не вращается, такое определение положения не работает. Чтобы запустить неподвижный двигатель, вводится режим пуска. Контроллер начинает переключать обмотки последовательно, независимо от положения ротора с небольшой скоростью. Как только ротор сдвинется, появится обратная связь, и двигатель выйдет на режим.
Конструктивно двигатель без датчиков проще, чем с датчиками. Но у этой системы есть и недостатки. Такие электродвигатели плохо стартуют, не развивая с места полного вращающего момента, что, к примеру, для автомоделей крайне важно. При перегрузке на низких оборотах система определения положения ротора без датчиков работает ненадежно. На разных оборотах оптимален разный сдвиг фаз между сигналом обратной связи и моментом коммутации обмоток. Особо продвинутые регуляторы хода это учитывают. В двигателях с датчиками это учитывается автоматически. Наконец, регулятор хода, не требующий датчиков, сложнее и дороже. На летающих моделях применяются в основном бессенсорные двигатели и регуляторы. На автомоделях - с датчиками.
Теоретикам
Для моделистов, которым интересно не только запускать радиоуправляемые модели, но и понимать суть происходящих внутри процессов, может быть интересен данный раздел.
Известно, что внешняя нагрузочная характеристика электродвигателя постоянного тока с возбуждением от постоянных магнитов сильно зависит от режима его питания. Поэтому многие моделисты спрашивают, что именно регулирует импульсный регулятор хода: - напряжение, подаваемое на электродвигатель, или его ток?
Формат статьи не позволяет привести здесь подробные теоретические выкладки. Поэтому перейдем сразу к выводам. Как это ни парадоксально, но с точки зрения нагрузочных характеристик электродвигателя, импульсный регулятор хода эквивалентен примитивному реостатному регулятору, упомянутому во введении к статье. Т.е. импульсный регулятор хода регулирует не напряжение, подаваемое на двигатель, и не его ток. Он регулирует сопротивление источника питания двигателя, а значит, подаваемую на него мощность.
Сразу оговоримся, что идеальный импульсный регулятор хода эквивалентен регулируемому балластному реактивному сопротивлению. Чем реактивный балласт отличается от активного? Тем, что на нем не рассеивается энергия. Действительно, через идеальный регулятор течет ток в те моменты, когда падение напряжения на нем равно нулю. Когда же падение напряжения на регуляторе не равно нулю - ток через него не течет. Поэтому интеграл от произведения мгновенных значений тока на напряжение на любом интервале времени будет равен нулю. Для переменного тока реактивные балласты широко известны и применяются, например, в люминесцентных лампах дневного света. Кстати, за рубежом повсеместно переходят на питание люминесцентных ламп от выпрямленного (постоянного) напряжения через импульсный реактивный балласт, совершенно аналогичный регулятору хода. На нашем сайте как-то предлагался зарядник аккумуляторов с набором реактивных балластов на конденсаторах - типовое решение для простейших сетевых зарядников.
Для электродвигателя без разницы, реактивный или активный балласт регулирует его мощность. Главное - он изменяет сопротивление источника питания двигателя.
Современные модельные электродвигатели обладают довольно жесткой внешней характеристикой при питании от стабильного источника напряжения. Особенно это характерно для двигателей с редкоземельными магнитами. Косвенно коэффициент жесткости внешней нагрузочной характеристики электродвигателя можно оценить по отношению тока заблокированного ротора к току при максимальном КПД. Для ферритовых моторов это значение колеблется около 7-8. Для самарий-кобальтовых и неодимовых моторов, как правило, больше 10.
Однако жесткость нагрузочных характеристик будет наблюдаться только на максимальном газу. По мере уменьшения газа, эквивалентное сопротивление источника для электродвигателя растет, и нагрузочная характеристика двигателя становится мягче. Ток блокировки падает быстрее тока максимального КПД. При этом обороты холостого хода уменьшаются незначительно. Плохо это или хорошо? Смотря для чего. С точки зрения снижения токовых перегрузок на пусковых режимах это неплохо. Мягкая нагрузочная характеристика облегчает плавность регулирования ускорением модели, придает ей этакую вальяжность. Вместе с тем, страдает разгонная динамика. Для гоночных автомобилей на сухом покрытии с хорошим сцеплением полезно иметь силовую установку с хорошей динамикой раскрутки. Чтобы компенсировать умягчение характеристики, в продвинутых автомобильных регуляторах вводят перерегулирование при динамичных перемещениях курка газа. Как это происходит, лучше пояснить на графике движения курка газа передатчика и мощности, подаваемой на двигатель.
Здесь черная линия - команда на управление газом от курка, красная - фактически подаваемая мощность на двигатель.
По внешнему эффекту такое перерегулирование напоминает систему kick-down в крутых автомобилях с автоматической КПП. Там при резкой даче газа автомат переключается на ступень вниз с одновременным обогащением смеси в двигателе на мощностной режим. При этом разгон автомобиля резко улучшается. Величина перерегулирования устанавливается при настройке многофункциональных регуляторов хода в числе других параметров, либо имеется в наборах предустановленных параметров под определенные трассы. На скользком покрытии такое перерегулирование очень вредно, поскольку провоцирует срыв колес в занос. Впрочем, на настоящих автомобилях происходит так же - включение режима kick-down на обледенелой дороге неотвратимо приведет к заносу. У винтовых движителей моделей - гребных и воздушных винтов - нет такой жесткой механической связи со средой, как в автомодели, поэтому для них нет необходимости компенсировать умягчение характеристики электродвигателя.
Заключение
В заключение, о традиционном философском вопросе моделиста - брать готовый регулятор, или делать самому. В отличие от редких случаев успешной самодельной аппаратуры радиоуправления, самодельные регуляторы хода гораздо более распространены. Особенно для обычных коллекторных двигателей. Это изделие принадлежит к той категории электроприборов, которые, будучи грамотно спроектированы и без ошибок смонтированы из заведомо годных деталей, не требуют настройки и регулировки, а работают сразу. Можно ли на этом сэкономить? Можно, и прилично. Поэтому, умеющие держать паяльник в руках, - дерзайте.
По регуляторам бесколлекторных двигателей - это несколько сложнее. Оцените сначала, посильна ли для вас технология их монтажа и сборки? Весьма плотный SMD-монтаж требует специальных навыков работы. Это тоже возможно, но не любыми руками. Да и времени потребует несопоставимо больше. В промышленных условиях монтаж плат ведет автомат, и только сборка плат в пакет идет вручную. Трудно соревноваться с умными машинами.
При самостоятельной разработке оригинальных схем нужно учитывать много особенностей современной силовой электроники. Иначе будет дым и разочарование.
Что касается ремонта регуляторов хода - это дело по силам многим. Автор отремонтировал десятки различных регуляторов как обычных, так и бесколлекторных моторов. Если платы не выгорели в дым - все можно восстановить.
Обсудить на форуме